NASA Space Robotics Dive into Deep-Sea Work
What’s the difference between deep space and the deep sea? For a robot, the answer is: not much. Both environments are harsh and demanding, and, more importantly, both are far removed from the machine’s operator.
深空和深海有什么区别?对于机器人来说,答案是:不多。这两种环境都很苛刻,更重要的是,这两种环境都远离机器的操作员。
That’s why a team of roboticists from NASA’s Johnson Space Center in Houston decided to apply their expertise to designing a shape-changing submersible robot that will cut costs for maritime industries.
这就是为什么来自美国宇航局休斯顿约翰逊航天中心的机器人专家团队决定应用他们的专业知识来设计一种可以改变形状的潜水机器人,这将降低海事行业的成本。
“What NASA taught us is to put together robust software autonomy with a capable hardware morphology and deploy it in a remote setting,” said Nic Radford, founder, chairman, president, and CEO of Houston-based Nauticus Robotics Inc. During his 14 years at Johnson, Radford was, among other roles, deputy project manager and chief engineer for the humanoid robot Robonaut 2. Now more than 20 engineers who worked on that project and other NASA robots have joined the 80-person team he’s put together at Nauticus.
总部位于休斯顿的Nauticus Robotics公司创始人、董事长、总裁兼首席执行官尼克·雷德福说:“NASA教会我们的是,将强大的软件自主权与强大的硬件形态结合起来,并将其部署在远程环境中。”在约翰逊工作的14年里,雷德福担任过副项目经理和人形机器人Robonaut 2的总工程师。现在,20多名参与该项目的工程师和其他NASA机器人加入了他在Nauticus组建的80人团队。
Whether a robot is working in space or on the seabed, the operator is far away, with limited communication and knowledge of the robot’s surroundings, Radford said. “Even if you’re putting it on the space station and controlling it from the ground, there’s no high-speed data network. Talking to the space station is more akin to using dial-up.” So the robot has to sense and understand its environment, navigating obstacles and manipulating objects with minimal operator input.
雷德福说,无论机器人是在太空还是在海底工作,操作员都离得很远,对机器人周围环境的交流和了解有限。“即使你把它放在空间站上,从地面控制它,也没有高速数据网络。与空间站通话更类似于使用拨号上网。”因此,机器人必须感知和理解它所处的环境,以最小的操作输入导航障碍物和操纵物体。
For Robonaut 2, this meant Johnson engineers had to develop not just advanced hardware like tendon-powered hands, elastic joints, and miniaturized load cells, but also vision systems, force sensors, and infrared sensors to gather information, as well as image-recognition software, control algorithms, and ultra-high-speed joint controllers to process and act on that data.
对于“机器人2号”,这意味着约翰逊的工程师们不仅要开发先进的硬件,如肌腱驱动的手、弹性关节和小型化测压元件,还要开发视觉系统、力传感器和红外传感器来收集信息,以及图像识别软件、控制算法和超高速关节控制器来处理和处理这些数据。
Built under a partnership between NASA and General Motors (GM), Robonaut 2 proved itself as an astronaut assistant aboard the International Space Station. But it was also a testbed for all these advanced robotic systems. NASA wants to develop robots to do dangerous work in space, run “precursor missions” that prepare for the arrival of human astronauts, and maintain facilities like the planned lunar Gateway station when astronauts aren’t around. GM, meanwhile, wanted to explore robotics that could assist factory workers. The project produced about 50 patents, several of which have already been commercialized as a robotic glove that GM and others are using in the workplace.
“机器人2号”由美国国家航空航天局(NASA)和通用汽车公司(General Motors)合作建造,在国际空间站上证明了自己是一名宇航员助手。但它也是所有这些先进机器人系统的试验台。美国宇航局希望开发机器人在太空中从事危险工作,执行为人类宇航员到来做准备的“前兆任务”,并在宇航员不在时维护计划中的月球门户站等设施。与此同时,通用汽车希望探索可以帮助工厂工人的机器人技术。该项目产生了大约50项专利,其中几项已经作为机器人手套商业化,通用汽车和其他公司正在工作场所使用。
Unlike a robot in space, deep-sea robots can be connected to operators with a cable to allow high-speed data transfer and close control. But Radford said this comes at the price of staffing and operating a huge support vessel on the surface, to the tune of about $100,000 and 70 metric tons of greenhouse gas emissions per day.
与太空中的机器人不同,深海机器人可以通过电缆与操作员连接,实现高速数据传输和近距离控制。但雷德福说,这是以人员配备和在海面上运行一艘巨大的支援船为代价的,大约需要10万美元,每天排放70公吨温室气体。
Nauticus is eliminating that cord by enabling its robots to work with minimal supervision from a control center on a distant shore.
Nauticus正在消除这种束缚,让机器人在遥远海岸的控制中心进行最低限度的监督下工作。
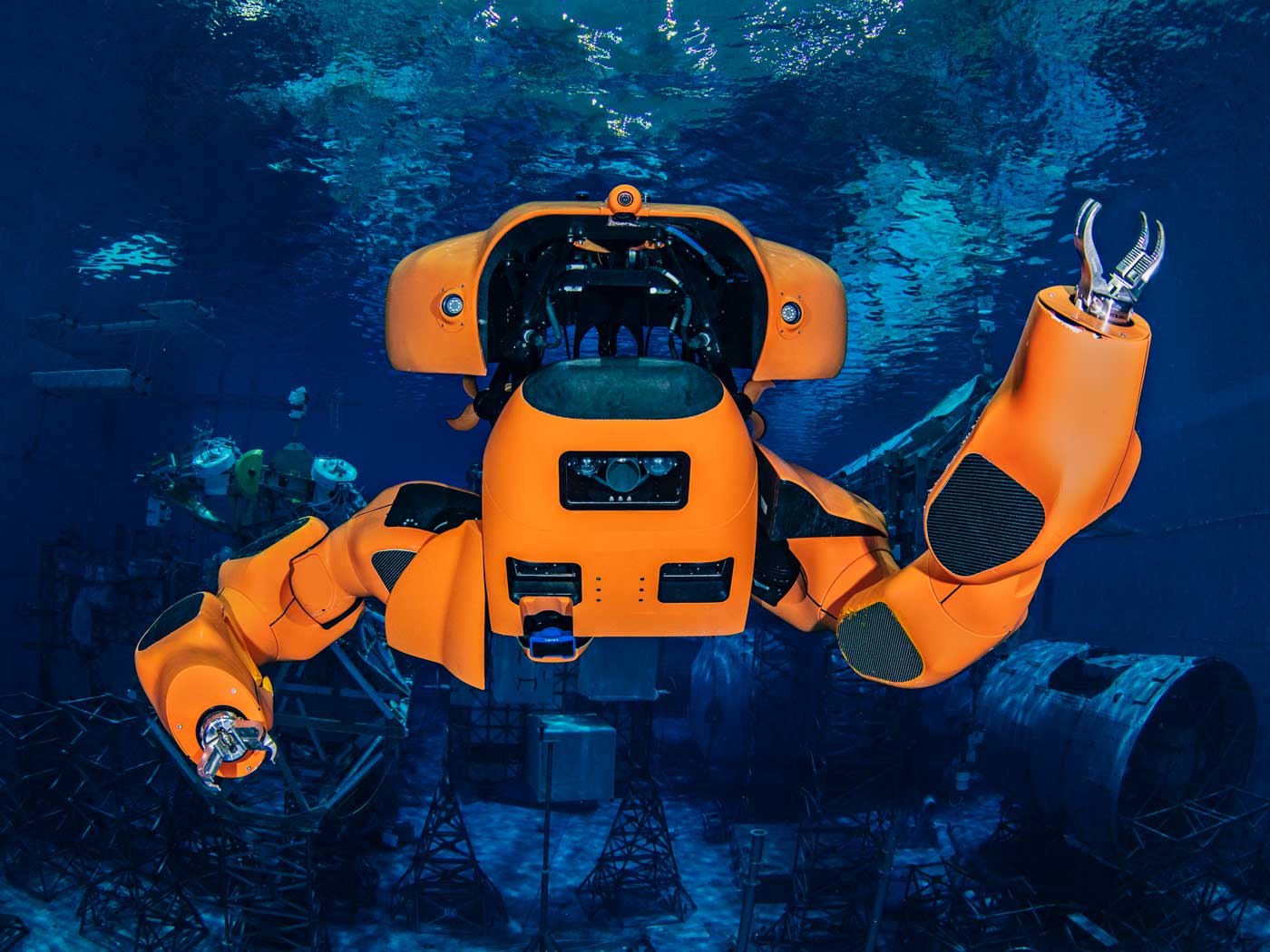
Bright orange, fully electric, and about the size of a sports car, Aquanaut, the company’s signature robot, resembles a propeller-driven torpedo as it motors to its destination. At that point, its shell pops open and the nose flips upward to reveal a suite of cameras and other sensors, now facing front. Two arms swing out, ending in claw hands that can be fitted with different tools.
该公司的标志性机器人Aquanaut亮橙色,全电动,大小约为跑车,在驶向目的地时,它就像一枚螺旋桨驱动的鱼雷。在这一点上,它的外壳弹出,机头向上翻转,露出一套摄像头和其他传感器,现在面向前方。两只手臂向外摆动,末端是爪子,可以安装不同的工具。
Read more at Nasa.gov
在NASA官网上访问更多